Supplementary: Arduino Serial Communication
Estimated time to complete this lab: 1 hour
This tutorial is adopted from Arduino tutorial for programmer. They use Linux to play with Arduino, you should replace /dev/ttyX to COMx if you use Windows
Objectives
At the end of this self-learning lab, you should be able to:
- Send / receive data between your computer and Arduino
Info
This lab is optional. It lets you learn more intermediate but useful programming techniques in Arduino. If you find it difficult, feel free to skip this lab.
Background. Why do we need serial communication?
- Arduino has limited processing power (20MHz CPU clock rate) and our PC has limited I/O capability with hardware devices (e.g. few motors support USB directly).
- To allow them to work together, we require serial communication.
- For example, the Arduino can be responsible for collect sensor readings. It then sends this data back to the PC where data processing is done, which afterwards commands will be sent from the PC to the Arduino to control output devices accordingly.
Prerequisites
- Arduino runs on a modified version of C++. But even if you haven’t learnt C++ before, the examples below should still make sense. Still, you are recommended (but not required) to see this tutorial on the m2_wiki about C++ programming afterwards.
Section 1. Basic Data Types
- Data types on different platforms may be implemented differently.
- For example,
intis 2 bytes long on Arduino, but it is 4 bytes long on x86.
- For example,
- Therefore, it is recommended to explicitly tell the complier the variable length.
- The minimum unit of data storage in computer is byte (8 bits).
Common C language data types
| Type | Length | Range |
|---|---|---|
| uint8_t | 8 bits (1 byte) | 0 - 255(2^8 -1) |
| uint16_t | 16 bits (2 bytes) | 0 - 65535 (2^16 -1) |
| int8_t | 8 bits (1 byte) | -128 - 127 (-2^7-1 to 2^7) 1 bit for the sign |
| int16_t | 16 bits (2 bytes) | -32768 - 32767 (- 2^15 - 1to 2^15) |
| char (an ASCII character) | 8 bit (1 byte) | 0 - 255 |
| float (IEEE standard) | 32 bits (4 bytes) | 3.4E-38 to 3.4E+38 |
- The 'u' stands for unsigned.
- C doesn't have native Boolean data type. Use any non-zero value for
true, zero forfalse. You can include<stdbool.h>to use thebooldata type to improve readability.
Section 2. Serial communication using Arduino and Serial Monitor
- We can send data to the Arduino via USB Serial using serial monitor in the VSCode. Let's try it!
- Upload
arduino_serial_demo.ino -
With the Arduino is plugged into the computer, open serial monitor in VSCode.
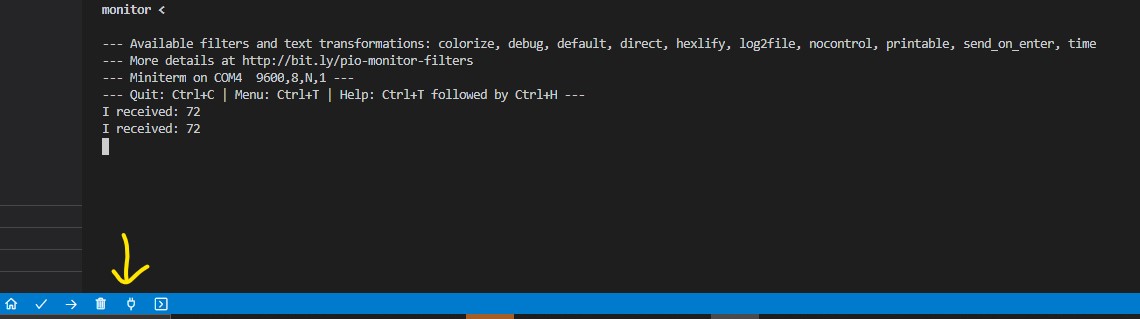
-
Visit https://docs.platformio.org/en/latest/projectconf/section_env_monitor.html to see how to change settings of serial monitor by editing
platformio.ini -
Try to send the message "abc". You should see some text show up. That is the message sent by the Arduino!
-
You may notice that the TX and RX LED light up on the Arduino when you click "send". This is because TX and RX indicate serial communication.
arduino_serial_demo.ino
int incomingByte = 0; // for incoming serial data
void setup() {
Serial.begin(9600); // opens serial port, with 9600 baudrate
}
void loop() {
// send data only when you receive data:
if (Serial.available() > 0) {
// read the incoming byte:
incomingByte = Serial.read();
// say what you got:
Serial.print("I received: ");
Serial.println(incomingByte, DEC);
}
}
The comments should be self-explanatory. Some further elaboration is given below:
- 9600 bps baudrate means that the serial communication speed is 9600 bits per second.
Serial.print()essentially writes a c-string to the serial output, which is actually a sequence ofchar(1 byte).
The meaning of I received 97 in the serial monitor is that 97 is the decimal form of
the character a in ASCII. In ASCII, every character is assigned a number from 0 to 127.

Try it yourself 1
- Connect the Arduino with an LED
- Now, modify the above (or write a new) program such that the brightness of the LED
is changed (using
analogWrite()) based on the serial input that is received. - After the brightness is changed, the Arduino should send a response message
Updated to %d(where%dis replaced by the brightness) via serial. - Perform serial I/O via the Serial Monitor.
- Hint: You need to use a function that translates c-string to integer (and perhaps vice-versa).
- Now, modify the above (or write a new) program such that the brightness of the LED
is changed (using
Section 3. Using Python for serial communication with Arduino
- Although we can use the Serial Monitor to send and receive data between Arduino and PC, this way of communication is only suitable for fast prototyping, and is not efficient nor flexible in production code (e.g. ROS node).
- We can also use the
pyseriallibrary in python to perform communication on the serial port. This can allow us to bridge Arduino board and the computer by ourselves.
Further reading
Read more about serial communication from the following websites:
pySerial
The serial monitor provides a convenient way for showing serial communication between the Arduino boards and the Computer. However, it does not allow the computer to react according to the value received. No worry, you can write your own Serial Monitor using Python! pySerial is a Library which allows python programs to access the serial port. Thus, we can now bridge Arduino board and the computer by ourselves.
If you haven't tried pySerial or want to further familiarize yourself with Python:
- Python and pySerial can be easily installed through
python-pip. Take Ubuntu as an example.sudo apt install python python-pip pip install pyserial
-
Install Python https://www.python.org/ or install using Windows store
-
Remember to add python to your PATH

or do it manually https://datatofish.com/add-python-to-windows-path/
-
Visit https://phoenixnap.com/kb/install-pip-windows to install pip
-
Use python -m pip install pyserial``` to install pyserial package
Further reading
Read more about Arduino and Python from the following websites.
Try it yourself 02
Take extra precautions while working at heights
Flash the following program to Arduino:
void setup() {
delay(1500);
Serial.begin(9600);
}
void loop() {
if (Serial.available()) { // If anything comes in Serial (USB),
Serial.write(Serial.read()); // read it and send it out Serial1 (pins 0 & 1)
}
}
This should echo all data sent from PC back. Open Serial Monitor and type something to see if it works.
Copy the following 2 programs as 2 separate files. change the line ser = serial.Serial('/dev/ttyACM0', 9600) according to the port name of Arduino in your OS. It should be something like /dev/ttyACM0.
# Listener: read char from USB Serial
import serial
ser = serial.Serial('/dev/ttyACM0', 9600) # port name
while True:
print ser.read()
# Talker: send char through USB Serial
import serial
ser = serial.Serial('/dev/ttyACM0', 9600) # port name
while True:
s = input("Enter your input: ")
ser.write(bytes(s, 'utf-8'))
Run the 2 programs together. Python programs can be executed with:
python (filename)
A serial port cannot be opened twice on Windows. Therefore, we have to use a multi-thread version. Copy the following program and save it as a file. change the line ser = serial.Serial('COM3', 9600) according to the port name of the Arduino in your OS. It should be something like COM4.
import serial
import threading
ser = serial.Serial('COM4', 9600) # port name
class thread_read_serial (threading.Thread): # read from the Arduino
def run(self):
while True:
print(ser.read())
class thread_write_serial (threading.Thread): # write to the Arduino
def run(self):
while True:
s = input("Enter your input: ")
ser.write(bytes(s, 'utf-8')) # convert utf-8 string to bytes
thread1 = thread_read_serial()
thread2 = thread_write_serial()
thread1.start()
thread2.start()
Run the program. Python programs can be executed with:
python (filename)
IDLE can't handle input() correctly. Use command prompt instead.
Words sent from the talker should be seen on the listener. Words have actually passed to the Arduino and back to the computer through USB Serial.
Section 4. Pass data in a packet
-
Data in the serial monitor is sent as text. This makes communication inefficient.
-
For example, if the integer 123 is sent as a string “123”, 3 bytes (ASCII characters) are sent and the Arduino needs to convert the string back to an integer.
It is better to use an unsigned 1 byte long integer (uint8_t) to send and represent 123 because only 1 byte is consumed.
-
Consider a robot with 3 servo motors and 3 DC motors controlled using Arduino
-
To control the position of the servo and the speed of DC motor, PWM control is needed and the range of the parameter of analogWrite() is from 0 to 255.
-
To control the 3 servo motors, we need 3 uint8_t fields (each using 1 byte) for the PWM value (0-255) encoding the servo angle.
-
To control the 3 DC servo motors, we need 3 int16_t fields (each using 2 bytes) to represent the speed of DC motor (-255 to 255) where the sign represents the direction of rotation.
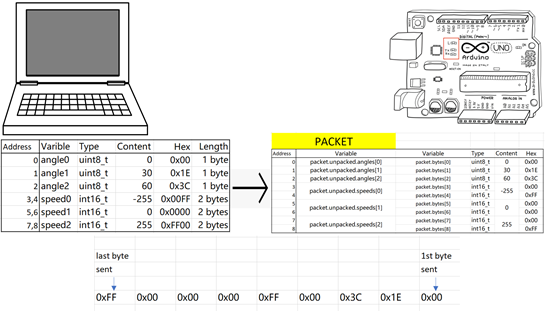
The packet will look like this
| 1 byte | 1 byte | 1 byte | 2 bytes | 2 bytes | 2 bytes |
|---|---|---|---|---|---|
| uint8_t | uint8_t | uint8_t | int16_t | int16_t | int16_t |
| angle[0] | angle[1] | angle[2] | speed[0] | speed[1] | speed[2] |
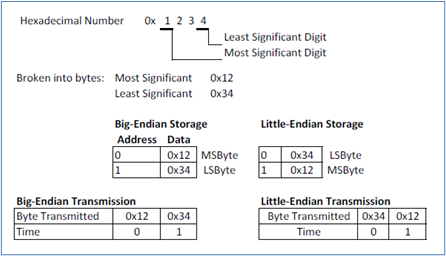
- Since both x86-64 CPU and the MCU used in Arduino (ATMega328p) store data in little-endian order, we will also use little-endian transmission in this lab.
- This is the code used to send data to Arduino, you can try it in python interactive mode.
Python:
import serial
import struct
# Connect to Arduino
arduino = serial.Serial("SERIAL PORT NAME", timeout=2)
angles = [0, 30, 60] # convert python int to uint8_t
speeds = [-255,0,255] # convert python int to int16_t
packet = struct.pack("<BBBhhh", *angles, *speeds)
# <BBBhhh stands for 3 uint8_t and 3 int16_t in little endian
# You can see what is in packet by
print(packet.hex()) # 001e3c01ff0000ff00 -> 9 bytes
# send the packet to Arduino
arduino.write(packet)
Arduino:
union{
char bytes[9];
struct{ // The struct and bytes[] share same memory location
uint8_t angles[3];
int16_t speeds[3];
}unpacked;
}packet;
void readPacket(){
while (Serial.available() < 9);
// do nothing and wait if serial buffer doesn't have enough bytes to read
Serial.readBytes(packet.bytes, 9);
// read 9 bytes from serial buffer and store them at a
// union called “packet”
}
void setup() { // put your setup code here, to run once:
Serial.begin(9600);
Serial.setTimeout(2000);
// give up waiting if nothing can be read in 2s
}
void loop() { // put your main code here, to run repeatedly:
int i;
readPacket(); // read 9 bytes and populate the packet union
for(int i=0; i<9; i++)
Serial.write(packet.bytes[i]); // send back the packet
for(int i=0; i<3; i++)
Serial.println(packet.unpacked.angles[i]);
// send back angle as string
for(int i=0; i<3; i++)
Serial.println(packet.unpacked.speeds[i]);
// send back speeds as string
}
After sending a 9 bytes packet to Arduino, the Arduino will reply with the same packet followed by a string of 3 angles + 3 speeds, print the values of angles and speeds in human readable string. You can read this in python with the following code:
import serial
import struct
import time
# Connect to Arduino
arduino = serial.Serial("COM4", timeout=1)
angles = [0, 30, 60] # convert python int to uint8_t
speeds = [-255,0,255] # convert python int to int16_t
packet = struct.pack("<BBBhhh", *angles, *speeds)
# <BBBhhh stands for 3 uint8_t and 3 int16_t in little endian
while True:
# See what is in packet
print("sending:", packet.hex()) # 001e3c01ff0000ff00 -> 9 bytes
# send the packet to Arduino
arduino.write(packet)
time.sleep(1) # wait Arduino process and reply
print("received:")
print("Original packet:", arduino.read(9).hex())
print("Values")
print(arduino.read(100).decode('ascii')) # print out human readable string
Section 5. Packet Framing and Checksum
If you are lucky, the previous example works, but it is not an robust way to transmit data. In reality, these things might happen:
- Some bytes are lost during transmission
- Some bits are flipped during transmission
- Your MCU keep sending data and you don't know which byte is the first byte of the packet
This will lead to misinterpretation of the data, and this can be dangerous, e.g. if you send 0x0001 to command the Arduino to output 1A to the motor but the first byte magically disappears and the Arduino mistakenly treat the first byte of the next command as the second byte of the current command, it will become 0x01?? or if the first byte is flipped it will become 0x8001. This might cause unimaginable consequence. So, we will need a more reliable way to transmit our data.
We can do the followings while framing our data to make it more reliable:
- Insert escape byte and flag byte to indicate the start and end of a packet
- Insert a byte to indicate how the length of your data if your packet contains variable length data (optional for fixed length packet)
- Insert a checksum byte just before the end of a packet
The packet will look like this.
| Byte 1 | Byte 2 | Byte 3 | Byte 4 | Byte 5 | Byte 6 | Byte 7 |
|---|---|---|---|---|---|---|
| DLE (0x10) | STX (0x02) | LEN (opt.) | DATA | CHECKSUM | DLE (0x10) | ETX (0x03) |
The reason why we are inserting DLE before STX and ETX is to reduce the chance of mistakenly treating 0x02 and 0x03 in your packet as the start byte or end byte.
Example
Arduino: Receive command from computer and reply with actual outputs
#include <Arduino.h>
struct Data
{ // The struct and bytes[] share same memory location
uint8_t angles[3];
int16_t speeds[3];
};
struct Packet
{
// send first
uint16_t start_seq; // 0x0210, 0x10 will be sent first
uint8_t len; // length of payload
struct Data tx_data;
uint8_t checksum;
uint16_t end_seq; // 0x0310, 0x10 will be sent first
// send last
};
struct Packet tx_packet; // store packet to be sent
struct Data rx_data; // store received data
/*
Calculate checksum by XOR-ing all the byte where the pointer "data" points to
@param data starting address of the data
@param len length of the data
@return caculated checksum
*/
uint8_t calc_checksum(void *data, uint8_t len)
{
uint8_t checksum = 0;
uint8_t *addr;
for(addr = (uint8_t*)data; addr < (data + len); addr++){
// xor all the bytes
checksum ^= *addr; // checksum = checksum xor value stored in addr
}
return checksum;
}
/*
Read packet from serial buffer
@return whether a packet is received successfully
*/
bool readPacket()
{
uint8_t payload_length, checksum, rx;
while(Serial.available() < 15){
// not enough bytes to read
}
char tmp[15];
if(Serial.read() != 0x10){
// first byte not DLE, not a valid packet
return false;
}
// first byte is DLE, read next byte
if(Serial.read() != 0x02){
// second byte not STX, not a valid packet
return false;
}
// seems to be a valid packet
payload_length = Serial.read(); // get length of payload
// can compare payload length or extra packet type byte to decide where to write received data to
if(payload_length == 9){
if(Serial.readBytes((uint8_t*) &rx_data, payload_length) != payload_length){
// cannot receive required length within timeout
return false;
}
}else{
// invalid data length
return false;
}
checksum = Serial.read();
if(calc_checksum(&rx_data, payload_length) != checksum){
// checksum error
return false;
}
if(Serial.read() != 0x10){
// last 2nd byte not DLE, not a valid packet
return false;
}
// last 2nd byte is DLE, read next byte
if(Serial.read() != 0x03){
// last byte not ETX, not a valid packet
return false;
}
// Yeah! a valid packet is received
return true;
}
void send_packet(){
tx_packet.len = sizeof(struct Data);
// mimick actual output
tx_packet.tx_data.angles[0] = rx_data.angles[0] + 5;
tx_packet.tx_data.angles[1] = rx_data.angles[1] - 5;
tx_packet.tx_data.angles[2] = rx_data.angles[2] + 3;
tx_packet.tx_data.speeds[0] = rx_data.speeds[0] + 15;
tx_packet.tx_data.speeds[1] = rx_data.speeds[1] + 3;
tx_packet.tx_data.speeds[2] = rx_data.speeds[2] - 11;
tx_packet.checksum = calc_checksum(&tx_packet.tx_data, tx_packet.len);
Serial.write((char*)&tx_packet, sizeof(tx_packet)); // send the packet
}
void setup()
{ // put your setup code here, to run once:
Serial.begin(9600);
Serial.setTimeout(5000); // give up waiting if nothing can be read in 2s
// init tx packet
tx_packet.start_seq = 0x0210;
tx_packet.end_seq = 0x0310;
while(!Serial){
// wait until Serial is ready
}
}
void loop()
{ // put your main code here, to run repeatedly:
if(readPacket()){
// valid packet received, pack new data in new packet and send it out
send_packet();
}
}
Python: Send command to Arduino and print out actual outputs
import serial
import struct
import time
angles = [0, 30, 60]
speeds = [-255,0,255]
arduino = serial.Serial("COM4", timeout=1, baudrate=9600)
time.sleep(3) # Arduino will be reset when serial port is opened, wait it to boot
def calc_checksum(data):
calculated_checksum = 0
for byte in data:
calculated_checksum ^= byte
return calculated_checksum
def read_packet():
'''
:return received data in the packet if read sucessfully, else return None
'''
# check start sequence
if arduino.read() != b'\x10':
return None
if arduino.read() != b'\x02':
return None
payload_len = arduino.read()[0]
if payload_len != 9:
# could be other type of packet, but not implemented for now
return None
# we don't know if it is valid yet
payload = arduino.read(payload_len)
checksum = arduino.read()[0]
if checksum != calc_checksum(payload):
return None # checksum error
# check end sequence
if arduino.read() != b'\x10':
return None
if arduino.read() != b'\x03':
return None
# yeah valid packet received
return payload
def send_packet():
tx = b'\x10\x02' # start sequence
tx += struct.pack("<B", 9) # length of data
packed_data = struct.pack("<BBBhhh", *angles, *speeds)
tx += packed_data
tx += struct.pack("<B", calc_checksum(packed_data))
tx += b'\x10\x03' # end sequence
print("Sending:", tx.hex())
arduino.write(tx)
def main():
timeout = 3
try:
# keep sending packet and try to unpack received packet
while True:
print("Setting angle outputs", angles) # first 3 unpacked values
print("Setting speed outputs", speeds) # next 3 unpacked values
send_packet()
time.sleep(0.5)
start_time = time.time()
payload = None
while(payload == None and time.time() < (start_time+timeout)):
payload = read_packet()
if payload == None:
print("timeout")
continue
# a packet is read successfully
unpacked = struct.unpack("<BBBhhh", payload)
print("Actual angle outputs", unpacked[:3]) # first 3 unpacked values
print("Actual speed outputs", unpacked[3:]) # next 3 unpacked values
print("\n\n")
except KeyboardInterrupt:
exit(0)
main()
Further reading
- USB CDC class - Wikipedia
- WsIaR? Communication!
- The Python Standard Library
- pySerial API - pySerial 3.0 documentation
- Short introduction - pySerial 3.0 documentation
Reference
https://eli.thegreenplace.net/2009/08/12/framing-in-serial-communications